Summary of Parameter Server
⚠ 转载请注明出处:Maintainer: MinelHuang,更新日期:Oct.04 2021

本作品由 MinelHuang 采用 知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议 进行许可,在进行使用或分享前请查看权限要求。若发现侵权行为,会采取法律手段维护作者正当合法权益,谢谢配合。
参考资料:Mu Li.Scaling distributed machine learning with the parameter server.OSDI.2014
目录
Section 1. 场景和Problems:介绍Spark等batch-processing system的局限性,引出parameter sever system
Section 2. Architecture:设计Parameter Server整体架构,解决stateful function,异步执行tasks以及schedule问题
Section 3. Implementation:设计容错方法以及在系统中的一些细节优化。
Section 4. 总结:总结Parameter Server系统的Insight。
1. 场景和Problems
在Spark中,我们发现batch-processing system针对计算任务的reuse和stateless特征,设计了一套高效的分布式批处理系统,适用于一些简单的迭代式机器学习。在此章节中,笔者着重想讲明白,为什么新的场景下batch-processing system会出现新的挑战,计算特性发生了何种变化,以及如何优化。在此章节笔者同样希望验证对Spark insights的总结是否到位,并会时刻将parameter server架构和Spark架构对比论述。
Large scale ML场景特征及Problem
何为large-scale?现实的training data can range between 1TB - 1PB,这导致在创建一些复杂模型时,其parameters规模可能达到10^9 - 10^12数量级。在使用Spark实现ML时,并没有将Parameters作为一个数据进行处理,即使用RDD封装,而是仅作为function的参数传递(表现为在Driver中存储并传递)。而当parameters规模变大后,一次迭代的数据流图变更为: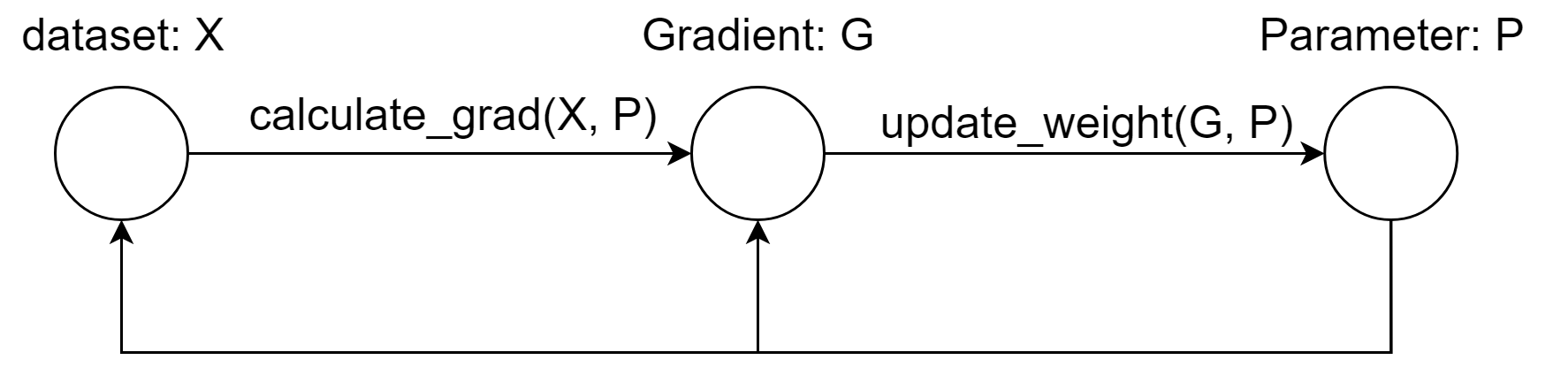
可以看到,在第k次迭代时,calculate_grad和update_weight过程都需要k-1次迭代时的P矩阵,这意味着这两个function变为stateful function,故如若像Spark中置于stateless worker上执行,必定要引入一次shuffle过程,来将Parameter拷贝至每一台参与的workers中。Spark的优化方法显然在此场景中有所欠缺,即两个function执行前都需要shuffle,然而一个朴素的思想是,如果加入一组stateful workers来执行update_weight function,P显然在一次迭代中仅需传递一次。
在此,我们可以对Spark加深一步总结,当使用stateless worker执行stateful function时,需要增加shuffle过程,强制的将stateful转变成stateless function。同时,我们可以发现在更新P时,必须等待所有的sub-computation完成后才能更新,即同步更新,或称为强一致性的计算。故我们需要一种新的架构和scheduler来减小二者对系统的影响。当然,Spark在stateless+批处理(reuse)的场景下依旧是非常高效的,故该如何设计一个系统,保留Spark的高效部分,并又能处理stateful function呢?
原论文中将上述challenge总结,如下:
1. Accessing the parameters requires an enormous amount of network bandwidth.
2. cost of synchronization and machine latency is high.
3. At scale, fault tolerance is critical.
原论文中将其贡献总结如下:
1. Efficient communication: 提出异步通信模型(通信不会阻塞计算),这个优化降低了network traffic and overhead
2. Flexible consistency models: 降低模型训练对一致性的需求,从而降低synchronization cost and latency
3. Elastic Scalability: 新节点的加入不需要重启系统
4. Fault Tolerance and Durability
5. Ease of Use
总结:通过分析large-scale machine learning计算过程,我们发现传统的计算gradient过程和update weights过程因为parameters过大,导致其变成了stateful function(state为parameters),故朴素的思想为将worker分为stateless workers(仅进行运算)以及stateful workers(维护和更新parameters)。在这样的分组下,如何设计整套系统,以解决上述challenges。
2. Architecture
本章将先叙述PS的架构与设计细节,而后将总结其Insights。根据上一节的内容,笔者将在此章着重考虑几个问题:
1. 将workers分为两组后,如何reduce PS和workers之间的communication?
2. 如何schedule异构的Tasks?
Data and Communication
建立一个系统,首先要考虑数据在该系统中是如何表示的,即data structure。在ML中,大部分计算都是线性代数计算,其输入一般是vector、tensor等。故在PS系统中,数据使用(key, value) Vectors表示。
PS定义了两种通信方式:Push and Pull。其减少communication的insights是,在更新整个data矩阵时(如parameters),不需要传递整个矩阵,二是仅需要把需要更新的行进行传递。故push and pull提供了Range接口,用于传递指定Key Range的数据。
System Architecture and Asynchronous Scheduling
PS架构如下图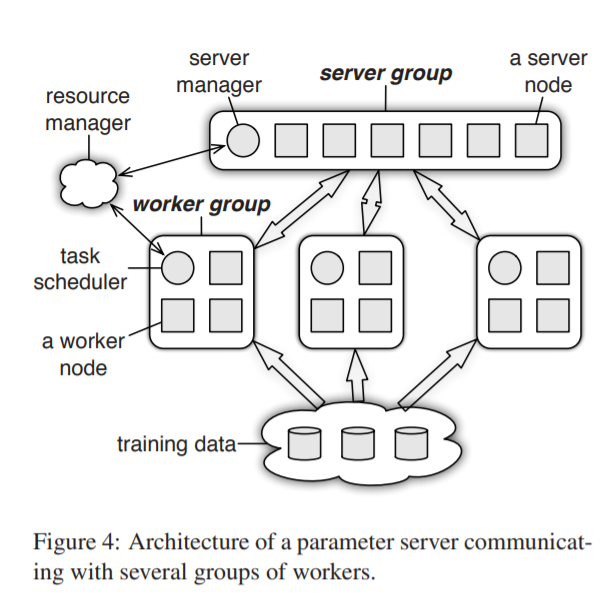
所有的node被分为worker group和server group。一个server node维护一部分shared parameters,为了reliability and scaling,server之间可能会发生数据的拷贝。所有servers的metadata在server manager上维护。
每个worker节点仅与server nodes通信,在每个worker group中都包含一个task scheduler节点,负责分配任务以及监控worker状态。training data存于workers中,每个worker存储其训练所需的data。
在该架构下,我们可以很轻松的实现异步Tasks的实现。通俗来说,各个worker在完成其任务后,仅需要传递给parameter server即可,故对于worker,仅需要考虑:本地Task完成后是立即执行,还是等待其他任务完成后再执行?两种执行方式的区别如下图: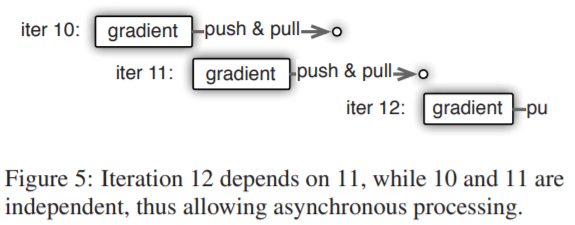
执行方式的判据为Task之间的依赖关系,若两次迭代的Task是independent,则立即开始下一次迭代的Task;反之该worker将等待此次迭代所有worker完成后(即parameter server下发新的weights后)开始执行新一轮的gradients计算。根据此Insight,我们需要一张Task dependency图来描述该过程。
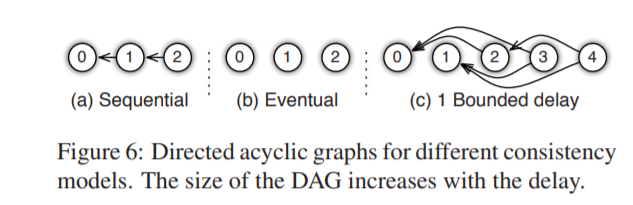
最后,如何schedule呢?仔细观察上述异步执行Task过程,iter 11中gradient计算是使用iter 10的weights执行的,这显然会slows down the convergence progress(如LR算法)。但不同的算法对这种问题的敏感度不同,故我们需要寻找system efficiency和algorithmconvergence rate之间的平衡点。故该问题将不会在系统层面优化,而是像algorithm designers提供flexibility in defining consistency models,包括:a. Sequential b. Eventual c. Bounded delay,如下图:
总结:
在第一章中,为了使stateful function和stateless function都能高效的执行,PS系统将nodes划分为workers group以及parameter servers,并且为了能够异步的进行gradient的计算,设计了多个worker group,并提供consistency model供algorithm designers设计其Task dependencies。在这样一种架构下,相较于spark,groups之间显然增加了communication开销(spark的insight是尽可能地让function在持有data的worker上进行,减少data copy的开销),故PS给出了(key, value) Vectors和Push and Pull方法来传输部分data,因此减小了communication开销。
3. Implementation
server manager和task scheduler分别负责server和worker的容错管理,如此容错和scaling分为三个子问题。第一为节点fault,或某个节点退出,或某个节点重连后,task该如何重分配;第二为如何判断一个communication message是新的;第三为如何replication。
针对第一个问题,worker方较为简单,task scheduler重新assign task to workers即可。而server方由于式stateful的,是需要维护parameters的并且是task的发起者,故我们需要设计一套replication和分割parameters的方法。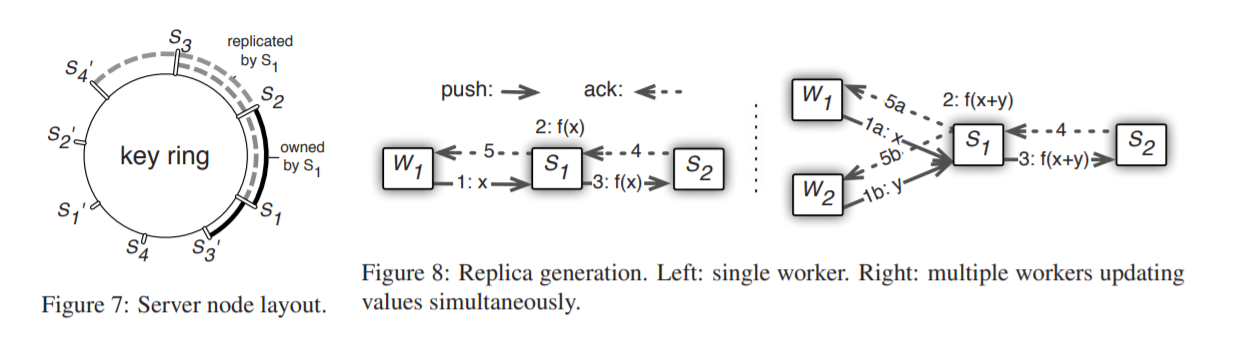
server manager负责维护一个关于parameters的key ring,每个server负责ring上的一个子弧,根据count direction进行replication,即s2上的parameter在s1上备份。Figure 8给出了worker上传更新信息后的备份过程。于是,server manager如何分配任务,以及replication问题同时被解决了。
最后关于如何判断message是否为最新的,PS采用clock的方式进行区分。每个Vector都包含一个clock,代表其在第几轮被更新,类似于GFS中的方法。唯一一个改动为,由于worker是根据一个range下的parameters作更新,故可以在传输时,传递key range信息,并令在该range下的vector都具有相同的clock时间即可,如此一来便压缩了communication messages的大小。
4. 总结
Parameter Server系统重点解决了stateful function问题(Spark等批处理系统处理该问题很低效),其核心方法在于设计了parameter server group作为stateful workers,来维护全局的state信息(parameters)。同时,设计worker groups继续进行stateless的计算gradient过程。关于Spark的其他问题,如强一致性的计算造成的waiting,实际上是由于出现了异步更新parameters的算法导致的,故需求一种异步通信方法来支持这类算法。
故PS系统主要解决两类问题,其一为stateful function执行问题,与异步执行tasks问题。其insights可以总结为parameter server group与根据task dependency设计flexible consistency。其余如data structure、fault tolerance、vector clock与key ring等笔者认为是细节上的优化。